Deep Defect Detection
Project Information
Within recent years, computer vision for detection of structural damage has become a large area of interest in the field of structural inspection. While various methods already exist for single-defect detection, there is still extensive research to be done to improve these methods to be able to 1) generalize to different data sets, and 2) detect more than one damage type using a single algorithm.
This Deep Defect Detection project aims to investigate how deep convolutional neural networks (CNNs) can improve upon the results achieved by current methods of computer vision for damage detection. Possible uses of CNNs and other vision techniques include:
- Binary damage/no damage classification to sort through images of buildings in post-disaster events. This application uses artificial intelligence to automatically prioritize which buildings require further inspection, so that engineers can focus their time on developing rehabilitation methods.
- Semantic element-wise pixel segmentation of images for detection of multiple defects (eg. cracks, spalls, and exposed rebar) withinin a single image. This application aims to replace manual human structural inspections, such as routine visual bridge inspection.
This project is a natural complement to our research group’s Robotic Inspection project, as cameras mounted on unmanned robotic vehicles can provide images to be used with CNNs and other computer vision techniques for defect detection. In addition, other sensor data (such as a 3D point cloud generated from a Lidar) can be fused with defects detected in the vision data to provide quantification and localization of the defect on the structure. The image below shows an example of automatic detection of delaminations in a bridge soffit from infrared images collected by a thermal camera mounted on an unmanned ground vehicle. Further information about how this work applies to robotic bridge inspection is shown in the Inspection Of Infrastructure With Mobile Robotics research page.
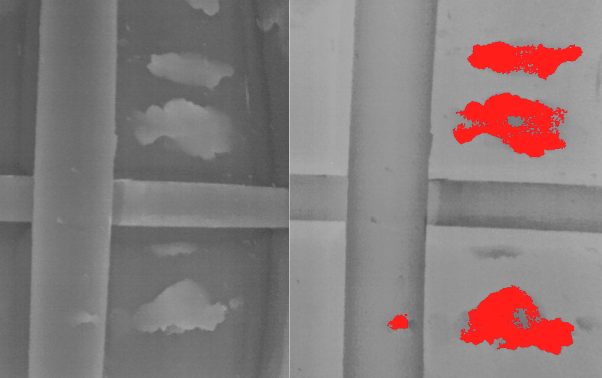
Figure 1: Example of delamination detection in an infrared image
This work is new so research results for this project will be coming soon.
Publications
- McLaughlin, E., Charron, N. and Narasimhan, S. (2019). Combining Deep Learning and Robotics for Automated Concrete Delamination Assessment. In Proceedings of 36th International Symposium on Automation and Robotics in Construction (ISARC), Banff, Alberta, May 22 – 24.
Students
Evan McLaughlin

Nicholas Charron

Dylan Dowling